En julio de 2015 nos sorprendimos con la noticia de que un trabajador de la planta de Volkswagen en Baunatal (Alemania) había muerto después de que un robot lo agarrara por el pecho y lo aplastara contra una placa metálica. Se atribuyó el suceso a un “error humano”. El portavoz de Volkswagen apuntó que “el robot no era de los de última generación de máquinas que trabajan codo con codo con los trabajadores en la línea de producción”.
La aplicación de los robots en procesos industriales está muy extendida en el sector industrial (principalmente en automoción) donde realizan multitud de tareas, principalmente secuenciales, repetitivas y a gran velocidad. No son frecuentes los accidentes vinculados con robots. Los pocos que se producen ocurren durante las operaciones de mantenimiento, ajuste, programación… Durante su funcionamiento cotidiano los robots industriales están en jaulas de seguridad, precisamente para prevenir incidentes en el contacto con los humanos.
Sin las medidas de seguridad adecuadas, los robots industriales tradicionales pueden producir gravísimos accidentes por aplastamiento, por atrapamiento (ocurre cuando el brazo, pierna u otra parte del cuerpo de un trabajador queda atrapada entre el robot y otra parte del equipo), por colisión o impacto (cuando el movimiento de un robot se vuelve impredecible y golpea al trabajador) o por proyección de materiales (cuando una parte del robot, de la herramienta o del producto manipulado, se rompe y sale disparada y golpea a un trabajador).
Ha sido obligatorio, por normativa de aplicación en toda la UE, dotar a toda el área de alcance del robot industrial de un perímetro de seguridad suficientemente dimensionado que evite el acceso al robot cuando esté en operación. En caso de ser necesaria la entrada a esta zona, el trabajador debe realizar algún tipo de acción que detenga al robot, facilitando el acceso. Las normas armonizadas ISO 10218-1 e ISO 10218-2: “Requisitos de seguridad para robots industriales” contienen los requisitos mínimos para el funcionamiento seguro de estos robots industriales.
Esta “separación” entre trabajadores y robots en un entorno industrial se va debilitando gracias a los robots colaborativos ya disponibles en el mercado (familia de robots UR de Universal Robots, YuMi de ABB, robot LBR iiwa de KUKA…) y a la nueva norma ISO/TS 15066:2016 “Robots colaborativos” que especifica los requisitos de seguridad para los sistemas de robot industrial colaborativos. La norma describe diferentes conceptos de colaboración y los requisitos necesarios para lograrlos. La ISO señala que la operación de colaboración es un campo en desarrollo y que la nueva especificación técnica probablemente evolucionará en ediciones futuras.
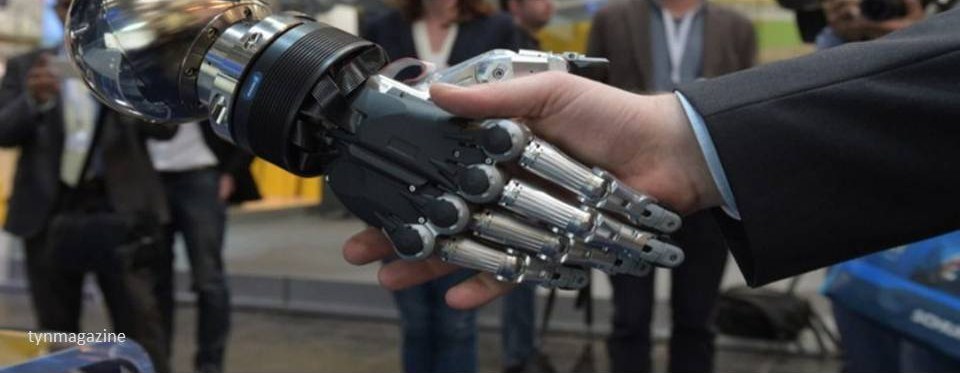
Los robots colaborativos se diseñan para funcionar en un espacio de trabajo compartido con los trabajadores y sin la necesidad de las protecciones convencionales, jaulas de seguridad o barreras de seguridad. La principal premisa en el diseño de estos robots es la seguridad de los trabajadores (primera ley de la robótica de Asimov: “Un robot no hará daño a un ser humano”). Estos robots están diseñados para trabajar codo con codo con los trabajadores.

La cercanía de trabajadores y robots requiere un gran diseño en materia de seguridad, basado en una combinación de diseño mecánico para el manipulador y de medidas de control para supervisar que el robot funciona con seguridad en todo momento en el entorno en el que se coloca. Así, más que hablar de robots colaborativos, en CARTIF hablamos de espacios de colaboración seguros entre trabajadores y robots (espacios colaborativos). No sólo es seguro el robot; también lo son la aplicación y el entorno de trabajo.
Para garantizar la seguridad se pueden utilizar distintas tecnologías y medidas de seguridad. Se pueden diseñar los robots ligeros, sin puntos de cizallamiento o corte, con geometrías redondeadas, superficies lisas y componentes deformables o elásticos. Se puede limitar la velocidad, aceleración y potencia del robot. Para detectar colisiones se pueden integrar sensores de corriente, fuerza, torsión. Se puede ajustar el movimiento en tiempo real del robot con sensores táctiles y de proximidad. Para ser “conscientes del entorno colaborativo” se pueden añadir sistemas visuales basados en tecnologías de visión artificial 2D/3D.
En general, los robots colaborativos son similares a los robots industriales tradicional pero más pequeños y ligeros, menos rápidos y potentes, más económicos y fáciles de instalar y configurar. Estos robots no necesitan ser rápidos ni potentes ya que se diseñan especialmente para interactuar con los trabajadores. Como indican los expertos, en un entorno colaborativo, el trabajador puede aportar habilidad, flexibilidad y, sobre todo capacidad de identificar, entender y resolver problemas, y el robot ofrecer repetibilidad, precisión y aguante. No obstante, la norma ISO/TS 15066:2016 no limita las capacidades del robot en aplicaciones colaborativas.

- Digitalizar la construcción para preparar su futuro - 4 abril 2017
- ¿Curie vs Tesla? Sensores autónomos embebidos en el pavimento - 31 enero 2017
- Seguridad en la robótica colaborativa - 27 junio 2016